新聞中心

四軸無人機簡介
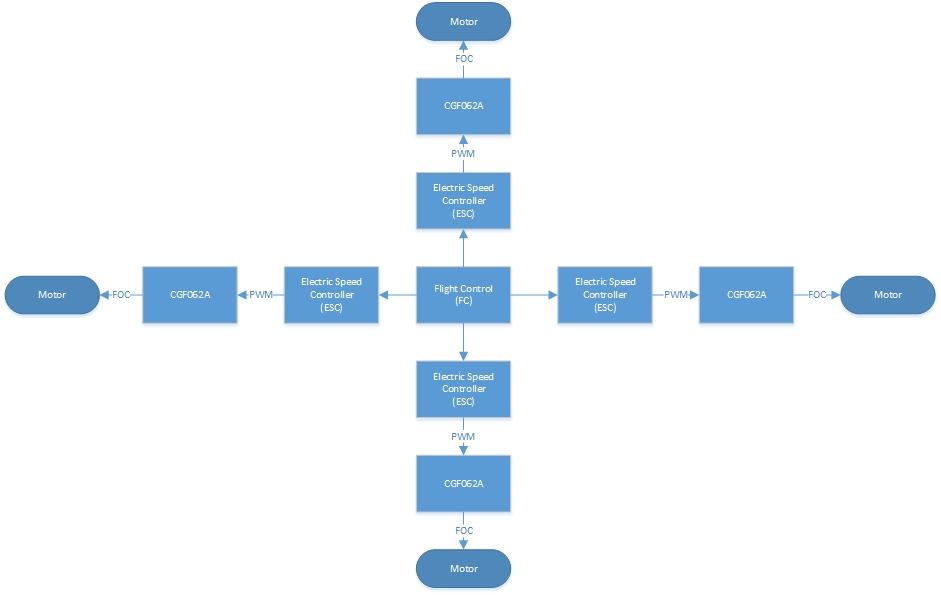
四軸無人機應用方框圖 (基於CGF062A)
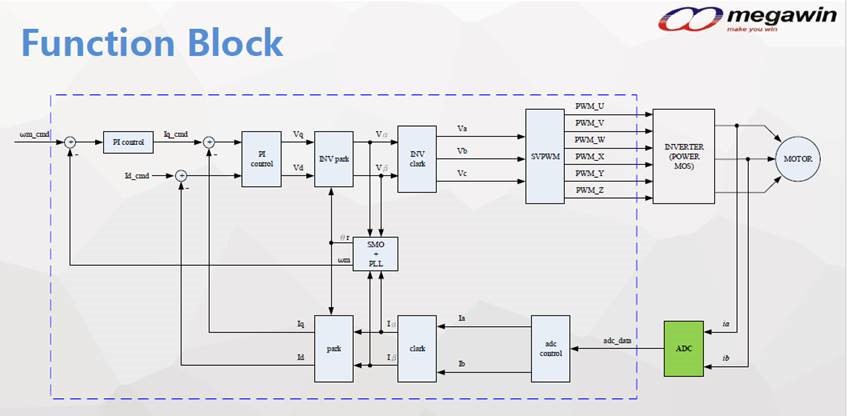
GF062A: https://www.megawin.com.tw/zh-TW/product/CGF062A

也歡迎聯繫我們的代理商,或洽詢笙泉科技銷售代表(sales@megawin.com.tw)。
笙泉科技股份有限公司

Innovative technology builds core value

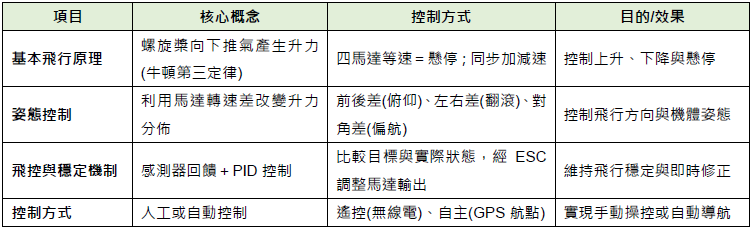
四軸無人機簡介
也歡迎聯繫我們的代理商,或洽詢笙泉科技銷售代表(sales@megawin.com.tw)。
笙泉科技股份有限公司
page
top